7 casos principales para la simulación de vehículos eléctricos
Por Steve Miller, MathWorks
Al diseñar un vehículo eléctrico, los ingenieros deben equilibrar el rendimiento y la eficiencia energética seleccionando la tecnología de almacenamiento de energía adecuada y minimizando las pérdidas del tren motriz. Estas y otras tareas críticas requieren la simulación del sistema físico a lo largo del desarrollo, desde la selección de una arquitectura de tren motriz hasta la prueba del software integrado.
Este artículo muestra cómo MATLAB®, Simulink® y Simscape™ son compatibles con los siete casos de uso más comunes para la simulación de vehículos eléctricos:
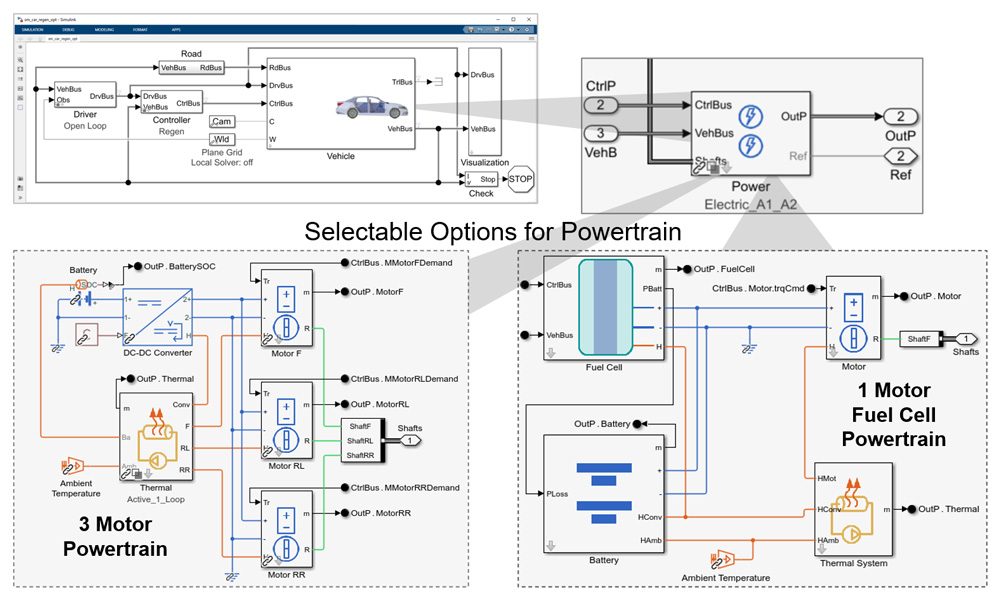
- Explore las arquitecturas del tren motriz eléctrico
Seleccionar la arquitectura adecuada para el diseño de un vehículo eléctrico es un desafío debido a las muchas opciones y compensaciones que deben considerarse. Las arquitecturas pueden incluir uno, dos o varios motores eléctricos.
2. Ajuste los algoritmos de frenado
Una gran ventaja de los vehículos eléctricos es su capacidad para recuperar energía cinética y almacenarla en la batería. Para maximizar la eficiencia de este proceso, la línea de transmisión, los convertidores de potencia y el diseño de la batería deben coordinarse con el algoritmo de administración de la batería.
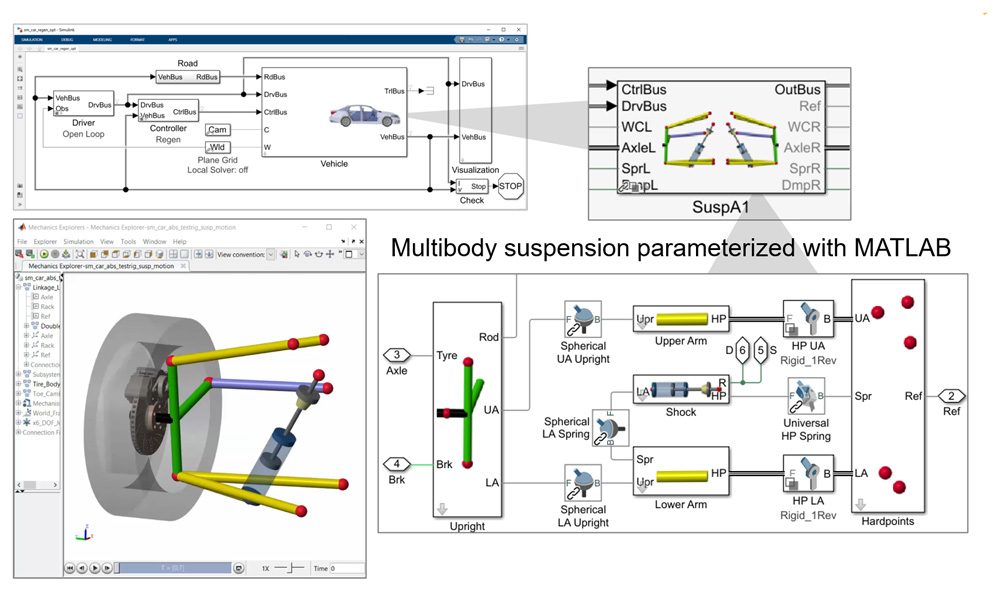
3. Modificar un diseño de suspensión
El diseño de la suspensión implica una compensación entre la comodidad de los pasajeros y el manejo del vehículo.
4.Optimizar el rendimiento del vehículo
Los sistemas de vehículos eléctricos a menudo son desarrollados por varios equipos diferentes. Por ejemplo, el tren motriz mecánico y los motores eléctricos son seleccionados por equipos separados de ingenieros y producidos por diferentes fabricantes.
5. Desarrollar controles de chasis activos
Los algoritmos de control del chasis, como el frenado antibloqueo, la vectorización de par y el control electrónico de estabilidad, son características de seguridad críticas.
6. Validar algoritmos ADAS
Los algoritmos ADAS siempre deben cumplir con los requisitos de seguridad, pero el diferenciador del mercado podría ser la calidad de la experiencia del pasajero.
7. Prueba usando hardware-in-the-loop (HIL)
El software de control integrado debe reaccionar adecuadamente cuando se expone a conductores experimentados o ingenuos, calles heladas o maniobras abruptas en vehículos nuevos o viejos.
El modelo de ejemplo utilizado en este artículo está disponible para su descarga.
Para ver el artículo completo click aquí
Traducción: Jaqueline Vicarte
Más información sobre este producto
Entre en contacto con: Rozzana Almaráz
ralmaraz@multion.com