")
Lorena Gonzalez Ingeniera de Aplicaciones Académicas | Quanser Inc.
Recientemente me incorporé al equipo de aplicaciones académicas de Quanser tras completar mi máster, y uno de mis primeros proyectos fue crear nuevos contenidos para nuestro QArm. Dado que ya habíamos cubierto la cinemática del robot, era esencial que ahora nos adentráramos en su cámara y en las cosas que los usuarios pueden hacer con él. Con las necesidades siempre cambiantes de la industria de la robótica, cada vez es más importante que las personas trabajen alrededor de los robots y compartan espacios con ellos. Esto da prioridad a la capacidad de un robot para detectar e identificar objetos y personas. Las cámaras y los LIDAR son algunos de los sensores que permiten a los robots comprender su entorno.
En Quanser, la mayoría de nuestras plataformas robóticas están equipadas con una cámara para ayudar a la percepción. Por ejemplo, nuestro QCar puede utilizarla para identificar carriles o señales de tráfico. El QDrone puede detectar obstáculos, identificar marcadores fiduciales para la localización o detectar líneas eléctricas y tuberías. El QArm puede encontrar cargas útiles y manipular objetos. La adición de una cámara es vital y un acelerador para el desarrollo de aplicaciones autónomas.
Nuevos laboratorios de visión
En este blog hablaremos de dos nuevos laboratorios que se introducirán en el plan de estudios de QArm. Estos laboratorios están pensados para introducir a los estudiantes en la representación digital de las imágenes y para que se familiaricen con el uso de filtros de imagen sencillos. Estos laboratorios también introducen a los estudiantes a la comprensión de los espacios de color y a la identificación y localización de objetos en una imagen, que son los bloques de construcción para las aplicaciones de percepción avanzadas. Esté atento a nuestras redes sociales para obtener más información sobre un próximo seminario web sobre estos laboratorios y las aplicaciones de visión por ordenador de nuestras soluciones.

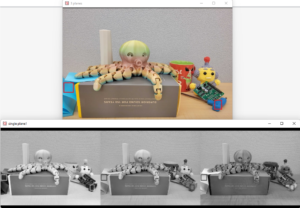
Laboratorio de espacios de colorEste laboratorio pretende introducir a las personas que son nuevas en la visión por ordenador (o en los bloques QUARC para la visión) en cómo se forman las imágenes digitales. Esto incluirá la comprensión y la visualización de imágenes en color en el espacio RGB que se muestra en la Figura 1a a continuación. En este espacio, los objetos más claros en cada plano corresponden a más de ese color, por ejemplo, los objetos amarillos aparecerán más brillantes en el plano rojo y verde ya que la mezcla de estos dos colores es lo que produce el amarillo digitalmente (figura 1c). Por último, analiza el popular espacio de color alternativo, HSV (figura 1b), y sus ventajas sobre el espacio RGB.

Laboratorio de detección de objetos
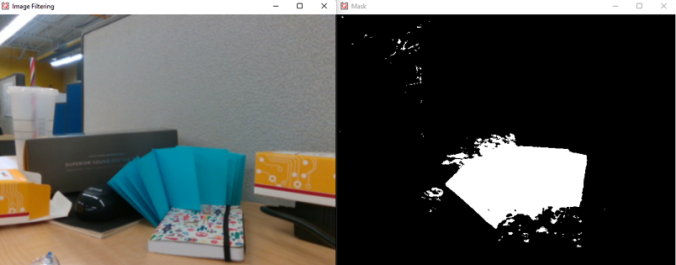
El siguiente laboratorio se basa en los conceptos anteriores. Los alumnos aprenden a extraer información binaria relacionada con los colores de su imagen original (por ejemplo, la figura 2a) representada como máscaras (figura 2b). Estas máscaras son imágenes con sólo dos valores posibles, alto o bajo, basados en alguna expresión lógica. Observe cómo la máscara resalta las partes de la imagen original que representan el cian. Un ejemplo de uso se muestra en la figura 2c, que es una combinación lineal de la imagen original y su versión en escala de grises, siendo la máscara y su inversa los pesos de los píxeles.
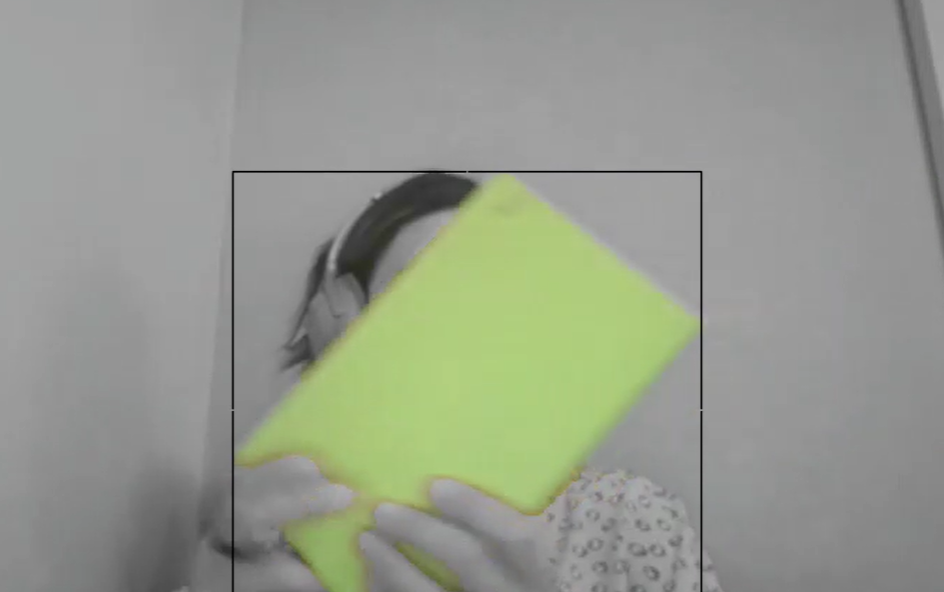
A continuación, los filtros de dilatación y erosión pueden limpiar la máscara. A continuación, se realiza el etiquetado de componentes conectados, que permite identificar los píxeles conectados que forman un objeto. Esto proporciona información útil, como los cuadros delimitadores, los centroides, el área de la mancha, etc., que puede utilizarse para la localización (figura 2d).
Ir al artículo original
https://www.quanser.com/blog/15173/
Más información sobre este producto
Entre en contacto con: Jacqueline Vicarte
jvicarte@multion.com